(fonte http://comingupshorthanded.com/how-robohand-works/)
Di Ivan Owen e Richard Van As
Gli strumenti che stiamo progettando sono puramente meccanici, con l'obiettivo di avere il miglior bilanciamento tra funzionalità e facilità di manutenzione e riparazione. Non ci sono componenti elettroniche, cavi, motori di alcun tipo.
Utilizzano cavi e pulegge, oppure leve e camme. La mano di Liam ne è un esempio.
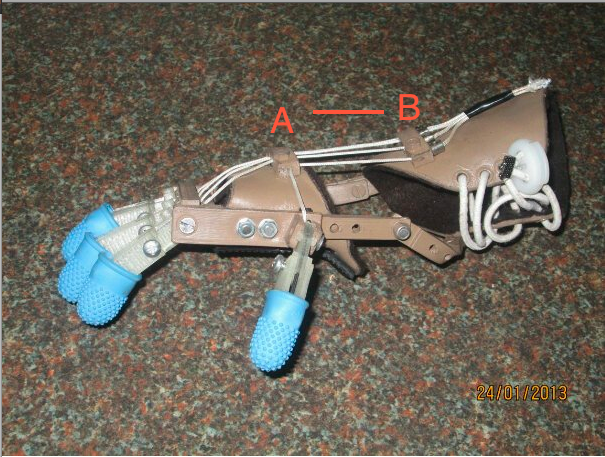
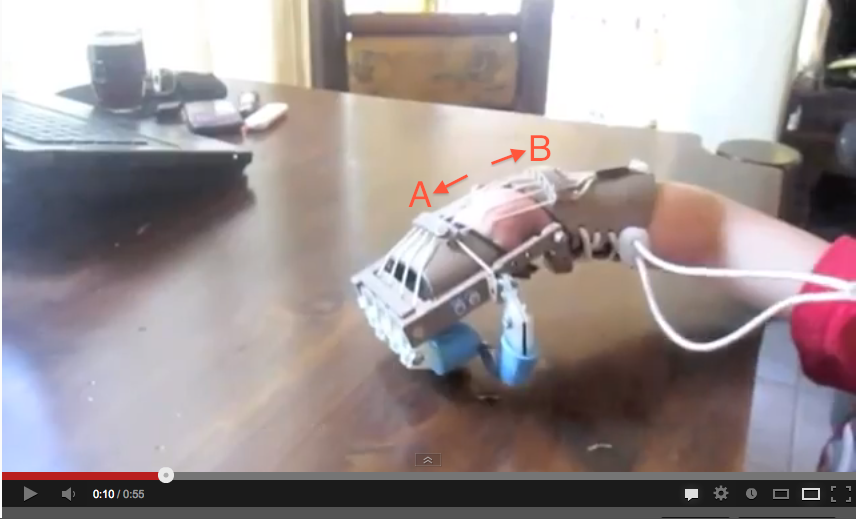
Le dita della Robohand di Liam si flettono quando un cavo e' tirato. I 5 cavi corrono sulla parte superiore della mano, dal punto A al punto B; dove si ancorano all'avambraccio.
Quando Liam piega il polso verso il basso, la distanza tra i punti A e B cresce. Questo tira i cavi. Quando alza il polso, rilascia la tensione nei cavi, e le corde, che si trovano sopra le dita, ne provocano la distensione.
Il vantaggio di questo sistema è la semplicità. Non ci sono batterie. Non è necessario cambiare una costosa componente elettronica, se si guasta.
Una mano più grande può essere stampata con facilità, man mano che il bambino cresce.